



2. 空间数据挖掘与信息共享教育部重点实验室, 福建 福州 350002;
3. 福州大学数字中国研究院, 福建 福州 350002;
4. 福建省制图院, 福建 福州 350001
2. Key Laboratory of Spatial Data Mining and Information Sharing of Ministry of Education, Fuzhou University, Fuzhou 350002, China;
3. Academy of Digital China, Fuzhou University, Fuzhou 350002, China;
4. Fujian Mapping Institute, Fuzhou 350001, China
结构化道路边界作为约束道路与道路附属设施分布范围的地物,是重要和基础的地理要素。准确、高精度的道路信息对于智能交通、城市规划以及智能导航与定位等应用具有重要作用[1-2]。车载激光扫描系统(mobile laser system,MLS)能够快速获取道路及两侧地物的三维坐标信息,为道路边界的提取与更新提供了一种新数据源[3-4]。相对于建筑物、车辆、植被等地物,结构化的道路边界形状细小,复杂多样,在海量车载激光点云中不明显,其完整性易受遮挡、噪声等因素影响。这些因素造成车载激光点云中道路边界提取困难,自动化程度低。
目前,基于车载激光点云提取道路边界的方法主要有两类:一类基于离散激光点云,逐点(point-wise)分析局部邻域的高程、法向量等多种特征,利用支持向量机(support vector machine,SVM)或k均值(k-means)等监督[5-7]或非监督分类器[8]提取道路边界。一类基于特征图像,将三维点云转化为二维特征图像,利用图像处理的方法,从特征图像中去检测、提取道路边界[9-12]。这些方法提取的道路边界噪声较多,需要大量的人工干预进行优化,且提取的多为离散无序且高度冗余的点集,未形成能够精确描述道路边界形状的矢量化信息。为了得到矢量化道路边界信息,还需要利用扫描线或伪扫描线信息[1],结合最小二乘法(least squares,LTS)[13]、随机抽样一致性(RANSAC)[14-15]或三次贝塞尔曲线(Cubic Bezier)算法[1, 16]等对道路边界进行追踪,拟合出道路边界。这些方法多采用自底而上的策略,需要定义一定跟踪准则将离散道路边界点连接成轮廓线,多适用于规则或结构化的道路边界,当面对不规则道路边界(绿化带、环岛等)时,难以保证提取结果是光滑、连续的闭合曲线。
近年来,基于微分几何的曲线演化理论广泛应用于图像或视觉的分割和追踪任务[17-18],其中最著名的模型之一就是主动轮廓模型(Snake)[19]。Snake模型能将边缘检测、跟踪与整体轮廓的提取等过程融合在一起,可同时引入道路边界线的平滑、连续性等高层知识,为车载激光点云中道路边界提取提供了一种新思路[20]。文献[21]中利用道路中心线的位置初始化Snake模型,基于点云的高程、反射强度、脉冲宽度等信息分别生成相应的梯度矢量流图像(GVF),吸引Snake轮廓线向图像的高梯度位置靠近提取道路边界[21]。文献[22]采用相似的策略从车载激光点云中提取路坎位置[22]。将导航信息与车载激光点云进行匹配作为道路中心点,利用椭圆模型来初始化Snake模型,结合Balloon Snake模型[23]和GVF Snake模型[24],借助外部能量推动Snake的曲线靠近道路边界。文献[25-26]设计了一种提取完整矢量道路边界的方法,首先利用OpenStreetMap(OSM)数据对车载激光点云进行分段与格网化处理,然后改进Ribbon Snake模型[27],以梯度矢量流加上宽度约束作为外部能量,提取包括遮挡及数据缺失区域的道路边界,生成具有语义和拓扑信息的三维矢量道路数据。
目前,基于Snake模型提取点云中的道路边界均基于图像来构建Snake模型,需要进行三维与二维的相互映射,无法直接应用到点云中。这个映射过程不可避免地存在精度的耗损及误差,还需要平衡道路提取精度与运行效率的问题。同时,目前提出的Snake模型多适用于单一形状具有固定宽度的非闭合直线或曲线型道路边界,难以适用于交叉路口、多车道的城市环境,不能处理非规则的花坛、道路路口等引起道路宽度变化的场景。针对以上的问题,构建基于离散点的Snake模型,该模型融合了传统的Snake、Ribbon Snake与Balloon Snake模型提取目标轮廓的优势,适用于多种道路场景的道路边界提取;针对不同类型的道路边界,确定其初始化选择策略;在能量函数中引入约束能量,加入宽度和方向约束,克服断裂、噪声点等对Snake模型的影响,提高道路边界提取的完整度与准确度,实现非闭合、闭合、道路出入口等多种复杂道路边界的精确提取,形成矢量化道路边界数据。
1 基于Snake的车载激光点云道路边界提取利用Snake模型提取道路边界,在初始轮廓逼近道路边界的过程中,需要对每个轮廓点施加一个外部力,外部力的大小和方向取决于当前轮廓点与道路边界的位置关系。由于车载激光点云数据海量且离散无序,场景复杂、目标多样等特点,直接计算整个场景的离散点梯度作为Snake模型外部力,非常耗时,其易受建筑物、树木等地物的影响导致Snake模型不收敛或易提取错误道路边界。考虑到道路边界通常位于特征点处(特征点除包含目标边界外还包含其他边界以及噪声点)[20],可提取道路边界特征点作为外力吸引Snake曲线的移动。本文先对车载激光点云进行预处理,分析局部点云的几何特征和维度特征,基于SVM提取具有显著道路边界特征的特征点作为Snake模型的收敛边界。利用(伪)轨迹点数据,首先确定初始位置,依据不同类型的道路边界选择Snake初始轮廓;然后基于离散点定义模型的内部、外部和约束能量,构建适合多类型道路边界提取的离散点Snake模型,通过能量函数最小化实现矢量道路边界的提取。该方法主要流程如图 1所示。

|
| 图 1 基于离散点Snake的车载激光点云道路边界提取 Fig. 1 Framework of extracting road boundaries from MLS point clouds based on discrete point Snake |
1.1 预处理
在车载激光点云中,计算整个场景的离散点梯度作为Snake模型提取道路边界的外部力,非常耗时;且受车辆、行道树、建筑物等其他地物影响,容易导致Snake模型陷入局部最小值而提前停止收敛。因此,本文采用文献[6]的方法,分析局部邻域中点云的高程、法向量和协方差矩阵相关等特征,利用SVM提取显著道路边界特征点作为Snake模型的收敛边界,用于约束Snake模型的参数曲线变化,提高Snake模型提取道路边界的效率与精度。
1.2 道路边界初始轮廓获取Snake模型提取道路边界易受初始轮廓的影响,初始轮廓线与道路边界实际位置越靠近,形状越相似,模型越收敛,提取精度越高。在城市环境中,不仅有带状分布的路坎,一些区域还存在闭合非规则分布的绿化带、花坛等道路边界,还包括在道路路口、叉路口等地方的道路边界,因此本文将道路边界划分为非闭合道路边界(带状分布路坎等)、闭合道路边界(花坛、绿化带等)和道路出入口(道路路口、交叉路口等)3类,利用(伪)轨迹点,借鉴传统Snake模型[19]与Ribbon Snake模型[27]初始化轮廓线的思想,在离散三维点云中确定多类型道路边界初始选择策略。
1.2.1 确定初始轮廓初始位置和类型在车载激光扫描系统中,轨迹点一般位于道路内部,可用于确定初始轮廓的位置。若无轨迹点数据,可根据扫描线上的点距离扫描中心越近分布越密集的特点,提取扫描线上分布最密集的点作为车载激光扫描系统作业时的行驶路径,并通过等间距采样获得伪轨迹点[1]。然后采用三次样条对(伪)轨迹点进行插值生成轨迹线v(s)=(x(s), y(s), z(s)), (0 < s < 1),其中,x(s)、y(s)、z(s)为组成轨迹线各点坐标信息,s为归一化弧长。
确定初始轮廓的位置后,需要判断该区域中存在的道路类型。为了确定该区域中是否存在闭合道路边界,可利用过轨迹线v(s)上各点的法线n(s)与道路边界的交点的个数n进行判断(如图 2(a)):若n≥2则表示该区域同时存在闭合与带状道路边界,将存在交点的(伪)轨迹点作为初始化闭合轮廓线的初始中心线vb(s);反之则只存在带状道路边界。

|
| 图 2 基于(伪)轨迹点的Snake初始轮廓参数化表示 Fig. 2 Parametric initialization of the ribbon and class Snake curves using pseudo-trajectory points |
1.2.2 初始轮廓参数化
为了初始化与实际道路边界相似的轮廓曲线,分别对非闭合、闭合、道路出入口处的道路边界进行初始化。
1.2.2.1 非闭合道路边界初始轮廓对于非闭合道路边界,基于轨迹线v(s),改进Ribbon Snake模型,引入道路宽度信息w(s)=(wl(s), wr(s)), (0 < s < 1),初始化左右条带vl(s)、vr(s)作为Snake模型的初始轮廓(如图 2(b))
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中,wl(s)、wr(s)表示轨迹线v(s)距离左右道路边界距离,即道路宽度的一半,在保证算法速度和精度的情况下,左右宽度初始值一般小于最小道路宽度的一半w0(s)=wl(s)=wr(s)≤1/2·min(wd),wd为道路宽度;n(s)为轨迹线单位法向量。
1.2.2.2 闭合道路边界初始轮廓对于闭合道路边界,需要初始化一个闭合的曲线用于Snake模型。采用与Ribbon Snake模型相似策略,该闭合曲线以轨迹线vb(s)为初始中心线,n(s)为单位法向量,生成左右条带vbl(s)=vb(s)-wbl(s)·n(s)、vbr(s)=vb(s)+wbr(s)·n(s),其中wbl(s)=1/2·wl(s)、wbr(s)=1/2·wr(s),再组合vb(s)始末点延长线得到闭合矩形曲线定义为闭合轮廓线(如图 2(c))。
1.2.2.3 道路出入口初始轮廓线道路出入口是非闭合道路边界的重要组成部分,主要包括“十”字形、“X”形、“T”形、“Y”形等类型。利用Snake提取的非闭合道路边界是两条完整连续的道路边界线,使道路出入口被错误连接。因此,本文将道路出入口划分为第3类道路边界,在提取完整的非闭合道路边界后,利用Snake模型进一步优化,将该处闭合的边界优化成与实际相符的形状。其主要步骤为:道路出入口决策;初始化拐角轮廓线。
(1) 道路出入口决策。道路出入口处存在小弯角道路边界,其主方向与x、y方向夹角θx、θy会存在一定角度,且该处线性分布指数Lλ较小[1]。可通过计算主方向与x、y方向的夹角θx、θy和线性指数Lλ来判断是否存在道路出入口拐点。
 (4)
(4)
式中,λ1≥λ2≥λ3为以Snake点为中心的局部邻域点构成的协方差矩阵的特征值,

|
| 图 3 初始化拐角轮廓线 Fig. 3 Initializing the corner curves of crossing |
 (5)
(5)
(2) 初始化拐角轮廓线。道路出入口处道路边界为非闭合道路边界,可采用初始化非闭合轮廓线相似策略初始化两个条带线,作为拐角轮廓线。但在道路出入口处一般不存在轨迹点和轨迹线,本文选取首末道路出入口拐点所在线段Lg的中心点pcenter来确定初始轮廓位置。定义以中心点pcenter为垂足,与线段Lg垂直的长度为L(L=w0(s))的垂线为轨迹线vg(s),生成宽度为wg(s)(wg(s)=|pstar-pend|/10)的左右条带vgl(s)、vgr(s),如图 3(b)所示。
为保证拐角道路边界处的连续性,取距离首末道路出入口拐点的两端10至30个Snake点,与左右条带vgl(s)、vgr(s)一起定义为拐角处初始轮廓线,即道路出入口处Snake的初始轮廓线,如图 3(c)所示。
1.3 基于离散点的Snake模型能量Snake模型能量由轮廓曲线的内部能量和点云数据产生的外部能量组成。最小化Snake能量时产生内力和外力,轮廓线在内、外力共同作用下向道路边界运动和演化。车载激光点云中的道路边界,受其他地物遮挡、噪声、点密度不均等因素影响存在弱边界或缺失边界区域,这些区域的轮廓线由于缺乏外力的作用容易发生泄漏,导致Snake不收敛或提前结束收敛。因此,本文在基于点的梯度建立Snake模型内、外部能量基础上,引入道路边界的高层知识,加上方向和宽度约束作为离散点Snake模型的约束能量,建立离散点Snake模型的能量函数。
1.3.1 Snake模型能量函数若用参数V(s)=(v(s), w(s))表示多类型道路边界初始轮廓线,离散点Snake模型能量函数构建如下
 (6)
(6)
式中,Eint表示模型内部能量,控制曲线的平滑性和连续性;Eext表示模型外部能量,吸引Snake向着道路边界处延伸或伸缩;Econ表示模型约束能量,辅助外部能量限制Snake的演变;v(s)是轮廓线位置信息,w(s)是宽度信息。
1.3.1.1 内部能量Eint内部能量Eint,利用道路边界轮廓线自身连续性与光滑性约束进行构建
 (7)
(7)
 (8)
(8)
式中,|Vs(s)|2是Snake轮廓线的一阶导数(连续能量),控制Snake轮廓线的连续性;|Vss(s)|2是Snake轮廓线的二阶导数(光滑能量),控制Snake轮廓线光滑性;α和β为权重参数,决定Snake在某点的延伸和弯曲程度,若α=0时,该点不连续,可出现断点;若β=0时,该点不平滑,可出现角点。
1.3.1.2 外部能量Eext外部能量Eext基于离散点的梯度构建。点的梯度信息可以描述道路边界边缘特性,推动Snake轮廓线向道路边界处演变
 (9)
(9)
式中,ω为权重参数;▽f(s)为Snake曲线中离散点的梯度值。
在Ribbon Snake中,为了使左右条带有效地收敛到道路边界两侧,将左右条带的梯度投影到n(s)上[27],因此,对于非闭合轮廓线,Snake曲线中点的梯度值▽f(s)由左右条带共同决定,则外部能量Eext定义为
 (10)
(10)
为了描述离散点的势能变化,在确定的收敛边界基础上,Snake各点p(xp, yp)的梯度值▽f(▽fx, ▽fy)定义为局部邻域r内各点pj(xj, yj), (j=1, 2, …, J)同向梯度值较多的平均值(如图 4)

|
| 图 4 离散点的梯度 Fig. 4 The gradient valueof a discrete point |
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
式中,▽fx、▽fy分别为Snake点p(xp, yp)在x、y方向上的梯度值;pj(xj, yj), (j=1, 2, …, J)为以点p(xp, yp)为中心邻域r内的点。Δxj+、Δxj-分别为点p(xp, yp)在x方向上Δxj的正、负值;n1、n2分别为邻域r内x正、负值的个数;Δyj+、Δyj-分别为点p(xp, yp)在y方向上Δyj的正、负值;n3、n4分别为邻域r内y正、负值的个数。
1.3.1.3 约束能量Econ在初始轮廓远离道路边界和道路边界缺失区域,▽f较小甚至为零,仅依靠内、外部能量难以推动Snake逼近实际道路边界,需要增加道路边界的高层语义信息(方向性和宽度)作为其他约束能量Econ,进一步推动Snake向道路边界运动。
 (15)
(15)
式中,Eball为外部方向约束;Ewidth为宽度约束。
针对初始轮廓离道路边界较远时,外部能量Eext的作用不明显问题,文献[23]提出了Balloon Snake模型,通过在传统Snake模型基础上,增加压力项使得Snake模型向外部能量较弱的地方继续演化[23]。不同于文献中力的表示,本文利用单位法向量定义Balloon能量,作为方向约束Eball,使该能量作用于轮廓曲线,推动Snake朝轮廓曲线垂直方向运动
 (16)
(16)
式中,κ为方向约束权重参数。通过动态设置参数κ,使方向约束更有效作用于能量函数,使Snake轮廓线具有膨胀或收缩的能量进而辅助外部能量限制Snake演变
 (17)
(17)
式中,rs为以Snake点为中心的搜索半径,取值为r的倍数。
在局部区域中,道路宽度变化缓慢,缺失边界信息处的道路宽度与道路边界完整处的宽度具有一致性。利用该特性,在能量函数中增加宽度约束Ewidth,增强Snake模型曲线的平滑性和连续性。
 (18)
(18)
式中,λ为宽度约束权重参数。
1.3.2 Snake模型能量函数最小化Snake模型将轮廓曲线逼近道路边界的过程转化为求解能量函数E(V)最小化问题。为了不断优化Snake中各点位置与对应的宽度,使Snake收敛于正确的道路边界位置,利用变分算法将式(6)中的能量泛函最小化[19]。由于轮廓曲线是由一系列离散点Vi={vi, wi}={{xi, yi, zi}, {wli, wri}}, i=1, 2, …, n组成的,为使能量函数E(V)最小化,则使用Euler-Lagrange偏微分方程求解如下方程
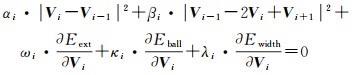 (19)
(19)
宽度wli、wri的约束仅来自Ewidth,据此将上述方程转化为分别求解以下两个离散Euler-Lagrange偏微分方程
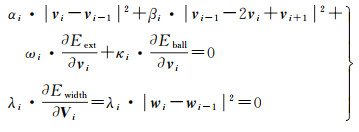 (20)
(20)
令
 (21)
(21)
式中,A是一个五对角带状矩阵;L是一个三对角带状矩阵。除闭合轮廓线外,需将第一个和最后一个点的α、β设为零值,第二个和倒二个点的β设为零值,以满足非闭合条件;此时矩阵A是奇异且不能倒转,通过迭代步长γ和时间t进行差分求解。
 (22)
(22)
式中,I是一个单位矩阵。
通过循环迭代求解能量函数最小值,得到Snake收敛道路边界结果(如图 5)。

|
| 图 5 基于离散点Snake提取的道路边界 Fig. 5 Road boundaries extraction based on discrete point Snake |
2 试验与分析 2.1 试验数据
为了验证本文方法的有效性,共选了3份不同城市场景的车载激光点云数据进行试验(图 6)。这3份数据均包含了大量的建筑物、行道树、车辆、电线杆等复杂城市地物,道路边界均受到其他地物遮挡而存在一定程度的缺失。其中,图 6(a)数据1和图 6(b)数据2是加拿大Optech公司Lynx Mobile Mapper V100系统采集的街区和居民区环境点云数据,数据1主要特点是整体呈环形分布,地势起伏比较大,存在道路出入口,道路边界因遮挡而不完整;数据2为复杂街区环境,目标多样,存在大量道路出入口,同时道路中央存在大量异形的隔离带等。图 6(c)数据3是Street Mapper 360系统采集的街区点云数据,地面起伏较大,数据密度较大。3份试验数据的基本信息见表 1。

|
| 图 6 3份不同城市场景的试验数据 Fig. 6 Overview of the three test datasets of urban scenes |
| 试验数据 | 采集系统 | 道路环境 | 试验范围/(m×m) | 平均点密度/(points/m2) | 扫描点数 |
| 数据1 | Lynx Mobile Mapper V100 | 居民区 | 296×463 | 155 | 8 139 726 |
| 数据2 | Lynx Mobile Mapper V100 | 复杂街区 | 394×2113 | 160 | 32 123 587 |
| 数据3 | Street Mapper 360 | 街区 | 178×1117 | 900 | 65 683 909 |
2.2 试验结果
本文通过预处理,提取显著道路边界特征点作为Snake模型的收敛边界(图 7中蓝色点)。因3份试验数据中都没有轨迹点数据,本文先将离散点云生成扫描线,等间距采样扫描线上分布最密集的点为伪轨迹点,并通过插值拟合成轨迹线,然后采用表 2的参数对3份数据进行试验。城市环境中,道路边界的高度一般为0.1~0.2 m,局部邻域半径r设置为0.2 m。在能量函数中,参数α和β控制Snake曲线的平滑性和连续性。闭合型道路边界多为环状分布,则光滑性约束强于连续性约束,因此权重β设为0.99,α设为0.01;而非闭合型道路边界多为带状分布,则连续性约束强于光滑性约束,参数α和β取值反之。因优化道路出入口阶段不划分类型,连续性与光滑性起同等约束,α与β均设为0.5。在Snake模型演化过程中,宽度能量与外部能量对非闭合型道路边界作用时起同等约束,权重ω和λ取值为0.5;道路出入口处的初始轮廓一般靠近道路边界且宽度具有较大的变化,不需要利用宽度信息约束轮廓曲线。因而与闭合型道路边界一样,道路出入口处的道路边界仅受外部能量约束,ω设为1,λ设为0。迭代步长γ全部设置为0.5。

|
| 图 7 道路边界提取结果 Fig. 7 Road boundaries extraction results |
| 参数描述道路边界类型 | 邻域半径r/m | 连续能量权重α | 光滑能量权重β | 外部能量权重ω | 宽度能量权重λ | 迭代步长γ |
| 闭合型 | 0.2 | 0.01 | 0.99 | 1 | 0 | 0.5 |
| 非闭合型 | 0.2 | 0.99 | 0.01 | 0.5 | 0.5 | 0.5 |
| 道路出入口 | 0.2 | 0.5 | 0.5 | 1 | 0 | 0.5 |
根据以上设置的参数值,实现3份试验数据道路边界的提取,结果如图 7所示。
为了更加直观地评价提取的道路边界与实际场景的吻合度,矢量化输出离散点Snake提取的道路边界并转换成Keyhole Markup Language(KML)文件,将其加载至Google Earth进行叠加显示(如图 8)。

|
| 图 8 矢量道路边界与Google Earth叠加显示 Fig. 8 Overlapped the extracted road boundaries and the Google Earth images |
从图 7和图 8可以看出,3份试验数据中绝大部分的道路边界都被提取出来,并且能较好地吻合实际环境中道路边界。这表明基于离散点构建的Snake模型不仅能实现左右断裂不一致的非闭合道路边界的准确提取(如图 8(a)),且适用于存在“T”形(如图 8(a))、“Y”形(如图 8(b))与“十”字形(如图 8(c))等形状的复杂道路边界,同时对异性花坛等闭合道路边界进行了较好的拟合(如图 8(b),如图 8(c)),能够优化断裂处、高噪声处的道路边界,实现矢量化道路边界的精细描述。
虽然本文方法能够适用于大部分城市场景的矢量道路边界提取,但仍存在部分误提取与漏提取的现象:①由于点密度稀疏,部分非闭合道路片段只有一侧存在道路特征点,不满足Ribbon Snake的演化要求而提前收敛造成漏提取(如图 9中场景A),这类情况主要发生在道路岔路口和数据采集的边缘处;②因道路边界形状过于特殊,难以定义较合适的初始轮廓线,造成道路边界误提取(如图 9中场景B);③受道路特征点提取的影响,一些斜坡处的道路出入口噪声点影响Snake模型的移动,使Snake收敛提取结束,提取的道路边界与实际道路形状偏差较大(如图 9中场景C)。

|
| 图 9 误提取和漏提取结果 Fig. 9 Overview of some subsets of misdetection and error detection |
2.3 试验结果分析与精度评价
由于没有真实的参考数据,本文借助Cloud Compare(CC)软件人工数字化道路边界作为参考数据。统计试验结果中正确提取的道路边界线的总长度TP、错误提取的道路边界线的总长度FP、缺失的道路边界线的总长度FN,采用准确率(Precision)、召回率(Recall)以及综合评价指标F1值(F1-Measure)构建评价标准[3],分析3份试验数据道路边界提取精度,见表 3。
| 试验数据 | TP/m | FP/m | FN/m | Precision/(%) | Recall/(%) | F1-Measure/(%) |
| 数据1 | 1 458.96 | 35.55 | 29.14 | 97.62 | 98.04 | 97.83 |
| 数据2 | 6 774.85 | 126.91 | 109.62 | 98.04 | 98.30 | 98.17 |
| 数据3 | 2 609.10 | 60.11 | 19.59 | 97.71 | 99.24 | 98.47 |
为进一步验证Snake模型提取道路边界的精度,对3份数据分别选取的图 7子图中的3个道路段计算道路宽度,与Cloud Compare软件中提取道宽度进行比较,见表 4。
| 数据 | 处理方法 | 第1段/m | 第2段/m | 第3段/m |
| 数据1 | CC软件提取 | 5.524 6 | 6.457 1 | 7.193 8 |
| 本文方法 | 5.543 6 | 6.449 7 | 7.157 8 | |
| 差值 | 0.019 0 | 0.007 4 | 0.036 0 | |
| 数据2 | CC软件提取 | 27.970 9 | 27.176 6 | 23.529 9 |
| 本文方法 | 27.901 6 | 27.166 1 | 23.539 6 | |
| 差值 | 0.069 2 | 0.010 4 | 0.009 8 | |
| 数据3 | CC软件提取 | 15.045 0 | 15.085 4 | 16.464 5 |
| 本文方法 | 15.113 4 | 15.028 9 | 16.510 6 | |
| 差值 | 0.068 4 | 0.056 5 | 0.046 1 |
结合表 3和表 4可以看出,相对于其他两份数据,虽然数据2的道路环境最为复杂,但道路边界提取的准确率最高,且道路宽度偏差最小,这是因为数据2受遮挡情况较少,道路边界较完整。在数据3中,道路形状相对比较规则,点密度高,道路边界特征点提取结果较好,召回率和F1值最高;但受点密度分布不均影响,其准确率低于数据2,在一些严重遮处道路宽度偏差较高。数据1存在遮挡严重与点密度稀疏等情况,导致准确率、召回率与综合指标F1值均较低,且在点密度稀疏的区域道路宽度偏差较高。但整体而言,在3份试验数据中,道路边界提取结果的准确率达到97.62%,召回率达到98.04%,F1值达到97.83%以上,且提取的道路边界与软件交互提取的结果有较好的吻合度,这表明基于离散点的Snake模型能够从车载激光点云数据中精确提取绝大多数的道路边界,不仅适用于非闭合型道路边界,对于复杂异形道路边界也能取得较好的结果。
为了进一步验证本文方法的有效性,分别选取利用Snake与非Snake的矢量道路边界提取方法与本文方法进行分析对比。其中,文献[1]使用的层次化策略方法可以对多种道路场景进行矢量道路边界的提取,因此本文采用试验数据1与试验数据2作为对比试验数据。文献[26]主要针对存在道路出入口的道路场景,利用Snake相关模型进行矢量道路边界的提取,因此本文采用试验数据1与试验数据3进行对比试验。基于上述方案,各组对比试验结果如图 10和表 5所示。从图 10中可以看出,3种方法对存在数据缺失的道路边界拟合效果较好(如图 10(a)①、②)。其中,使用了Snake相关模型的文献[26]与本文方法在道路出入口效果更佳(如图 10(a)),召回率均高于文献[1]。针对存在较多道路出入口与闭合道路边界的试验数据2,本文与文献[1]的方法均能较好地检测闭合型道路边界,但面对道路出入口时,文献[1]难以提取准确的道路边界;而本文方法不仅能拟合较大的道路出入口(如图 10(b)),同时能够检测较小的道路出入口(如图 10(b)),因此本文方法的准确率和召回率均高于文献[1]。针对存在较大道路出入口的试验数据3,文献[26]的拟合效果优于本文方法,其召回率高于本文方法。但本文方法在检测道路出入口的同时可以提取闭合的道路边界(如图 10(c)),具有较高的准确率和F1值。综上所述,采用层次化策略提取道路边界的方法适用于多种道路场景,但相对于Snake模型,其受道路边界形状和数据质量的影响较大。本文方法通过对承载高层知识的初始轮廓线进行改进,从而使融合了道路边界几何特征与高层知识的Snake模型进行搜索时能够修正噪声、断裂等对不同道路边界提取的影响,需要较少的专家经验,自动化程度较高。

3 结论与展望
基于Snake的“高度可变形”特征,本文提出一种基于离散点Snake的车载激光点云道路边界提取方法。不同于基于图像建立Snake的研究,本文采用离散点的信息去参数化Snake模型,将Snake直接应用到三维点云中;通过对初始轮廓的改进,融合了传统Snake、Ribbon Snake与Balloon Snake初始化轮廓线的优势,增加了Snake模型适用的道路场景类型;在内、外能量函数基础上引入方向和宽度约束,增强了Snake模型搜索不同形状道路边界的能力,同时解决了弱边界和缺失边界区域中Snake轮廓线泄漏问题。在3份试验数据中,道路边界提取的准确率、召回率和F1值均相应的达到97.62%、98.04%和97.83%以上,且试验结果与实际的道路边界有较好的吻合度。试验结果,表明本文方法能从车载激光点云中精确提取绝大多数的道路边界,不仅适用于规则的道路边界,对于复杂非规则道路边界也能取得较好的结果,能克服道路宽度变化、数据缺失和噪声等因素对道路边界提取影响。目前Snake模型的权重参数设置还需要一定的先验知识,因此未来的一个工作方向是改进Snake模型自适应参数选择,进一步提高模型自动化程度。
| [1] |
方莉娜, 杨必胜. 车载激光扫描数据的结构化道路自动提取方法[J]. 测绘学报, 2013, 42(2): 260-267. FANG Lina, YANG Bisheng. Automated extracting structural roads from mobile laser scanning point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(2): 260-267. |
| [2] |
王峰萍, 王卫星, 薛柏玉, 等. GVF Snake与显著特征相结合的高分辨率遥感图像道路提取[J]. 测绘学报, 2017, 46(12): 1978-1985. WANG Fengping, WANG Weixing, XUE Baiyu, et al. Road extraction from high-spatial-resolution remote sensing image by combining GVF snake with salient features[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(12): 1978-1985. DOI:10.11947/j.AGCS.2017.20170393 |
| [3] |
罗海峰, 方莉娜, 陈崇成, 等. 基于DBN的车载激光点云路侧多目标提取[J]. 测绘学报, 2018, 47(2): 234-246. LUO Haifeng, FANG Lina, CHEN Chongcheng, et al. Roadside multiple objects extraction from mobile laser scanning point cloud based on DBN[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 234-246. DOI:10.11947/j.AGCS.2018.20170524 |
| [4] |
魏征.车载LiDAR点云中建筑物的自动识别与立面几何重建[D].武汉: 武汉大学, 2012. WEI Zheng. Automated extraction of buildings and facades reconstruction from mobile LiDAR point clouds[D]. Wuhan: Wuhan University, 2012. |
| [5] |
ZHOU Liang, VOSSELMAN G. Mapping curbstones in airborne and mobile laser scanning data[J]. International Journal of Applied Earth Observation and Geoinformation, 2012, 18: 293-304. DOI:10.1016/j.jag.2012.01.024 |
| [6] |
罗海峰, 方莉娜, 陈崇成. 车载激光扫描数据路坎点云提取方法[J]. 地球信息科学学报, 2017, 19(7): 861-871. LUO Haifeng, FANG Lina, CHEN Chongcheng. Curb point clouds extraction from vehicle-borne laser scanning data[J]. Journal of Geo-Information Science, 2017, 19(7): 861-871. |
| [7] |
YANG Bisheng, LIU Yuan, DONG Zhen, et al. 3D local feature BKD to extract road information from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 130: 329-343. DOI:10.1016/j.isprsjprs.2017.06.007 |
| [8] |
李永强, 王文越, 郑艳慧, 等. 基于车载LiDAR数据的道路边界精细提取[J]. 河南理工大学学报(自然科学版), 2014, 33(4): 458-462. LI Yongqiang, WANG Wenyue, ZHENG Yanhui, et al. Refining extraction of road boundary from vehicle LiDAR date[J]. Journal of Henan Polytechnic University(Natural Science), 2014, 33(4): 458-462. |
| [9] |
ONIGA F, NEDEVSCHI S. Polynomial curb detection based on dense stereovision for driving assistance[C]//Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems.Funchal, Portugal: IEEE, 2010.
|
| [10] |
JAAKKOLA A, HYYPPÄ J, HYYPPÄ H, et al. Retrieval algorithms for road surface modelling using laser-based mobile mapping[J]. Sensors, 2008, 8(9): 5238-5249. DOI:10.3390/s8095238 |
| [11] |
魏双全, 房华乐, 林祥国. 先验知识引导的车载激光扫描点云道路信息提取[J]. 测绘科学, 2014, 39(10): 81-84. WEI Shuangquan, FANG Huale, LIN Xiangguo. Road information extraction from mobile laser scanning point cloud based on priori knowledge[J]. Science of Surveying and Mapping, 2014, 39(10): 81-84. |
| [12] |
杨必胜, 魏征, 李清泉, 等. 面向车载激光扫描点云快速分类的点云特征图像生成方法[J]. 测绘学报, 2010, 39(5): 540-545. YANG Bisheng, WEI Zheng, LI Qingquan, et al. A classification-oriented method of feature image generation for vehicle-borne laser scanning point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(5): 540-545. |
| [13] |
HATA A Y, OSÓRIO F S, WOLF D F. Robust curb detection and vehicle localization in urban environments[C]//Proceedings of 2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn, USA: IEEE, 2014.
|
| [14] |
MCELHINNEY C P, KUMAR P, CAHALANE C, et al. Initial results from European Road Safety Inspection (EURSI) mobile mapping project[J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2010, 38(5): 440-445. |
| [15] |
苏致远, 徐友春, 彭永胜, 等. 基于点云密度的结构化道路边界增强检测方法[J]. 汽车工程, 2017, 39(7): 833-838. SU Zhiyuan, XU Youchun, PENG Yongsheng, et al. Enhanced detection method for structured road edge based on point clouds density[J]. Automotive Engineering, 2017, 39(7): 833-838. |
| [16] |
SERNA A, MARCOTEGUI B. Urban accessibility diagnosis from mobile laser scanning data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 84: 23-32. DOI:10.1016/j.isprsjprs.2013.07.001 |
| [17] |
李天庆, 张毅, 刘志, 等. Snake模型综述[J]. 计算机工程, 2005, 31(9): 1-3. LI Tianqing, ZHANG Yi, LIU Zhi, et al. An overview on Snakes models[J]. Computer Engineering, 2005, 31(9): 1-3. |
| [18] |
FUA P. Model-based optimization: accurate and consistent site modeling[C]//Proceedings of the 18th Congress, International Society for Photogrammetry and Remote Sensing. Vienna: ISPRS, 1996.
|
| [19] |
KASS M, WITKIN A, TERZOPOULOS D. Snakes:active contour models[J]. International Journal of Computer Vision, 1987, 1(4): 321-331. |
| [20] |
孙金虎.点云模型分割与融合关键技术研究[D].南京: 南京航空航天大学, 2013. SUN Jinhu. Research on key technologies of point cloud segmentation and fusion[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013. |
| [21] |
BOYKO A, FUNKHOUSER T. Extracting roads from dense point clouds in large scale urban environment[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66(6): S2-S12. DOI:10.1016/j.isprsjprs.2011.09.009 |
| [22] |
KUMAR P, MCELHINNEY C P, LEWIS P, et al. An automated algorithm for extracting road edges from terrestrial mobile LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 85: 44-55. DOI:10.1016/j.isprsjprs.2013.08.003 |
| [23] |
COHEN L D. On active contour models and balloons[J]. CVGIP:Image Understanding, 1991, 53(2): 211-218. DOI:10.1016/1049-9660(91)90028-N |
| [24] |
XU Chenyang, PRINCE J L. Gradient vector flow: a new external force for snakes[C]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Juan, USA: IEEE, 1997.
|
| [25] |
韩婷, 杨必胜, 袁鹏飞, 等. OSM辅助的车载激光点云道路三维矢量边界提取[J]. 测绘科学技术, 2018, 6(2): 128-140. HAN Ting, YANG Bisheng, YUAN Pengfei, et al. OSm-assisted extraction of 3D vector boundary from mobile laser scanning point cloud[J]. Geomatics Science and Technology, 2018, 6(2): 128-140. |
| [26] |
韩婷. OpenStreetMap辅助的车载激光点云道路几何特征提取[D].武汉: 武汉大学, 2018. HAN Ting. OpenStreetmap-assisted extraction of road geometric feature from mobile laser scanning point clouds[D]. Wuhan: Wuhan University, 2018. |
| [27] |
LAPTEV I, MAYER H, LINDEBERG T, et al. Automatic extraction of roads from aerial images based on scale space and snakes[J]. Machine Vision and Applications, 2000, 12(1): 23-31. DOI:10.1007/s001380050121 |