



2. 中国科学院大学, 北京 100049;
3. 南京信息工程大学遥感与测绘工程学院, 江苏 南京 210044
2. University of Chinese Academy of Sciences, Beijing 100049, China;
3. School of Remote Sensing and Geomatics Engineering, Nanjing University of Information Science and Technology, Nanjing 210044, China
全球卫星导航系统(GNSS)包括美国的GPS、俄罗斯的GLONASS、中国的BDS及欧盟的Galileo系统。GNSS应用覆盖导航、授时、大地测量、地球大气环境监测等领域[1-3]。其中,BDS作为中国独立研制的导航系统,遵循三步走原则,即BDS-1(演示系统),BDS-2(区域系统)和BDS-3(全球系统)[4]。BDS-2包含5颗地球静止轨道(geostationary orbit,GEO)卫星,4颗倾斜地球静止轨道(inclined geostationary orbit,IGSO)卫星和4颗中轨卫星(medium earth orbit,MEO)卫星,并提供B1I(1 561.098 MHz),B2I(1 207.14 MHz)和B3I(1 268.52 MHz)信号。BDS-3系统从2018年12月27日开始提供全球定位,导航和授时(positioning, navigation and timing,PNT)服务并且能提供B1C(1 575.42 MHz),B2a(1 176.45 MHz)和B2b(1 207.14 MHz)新信号[5-6]。对于Galileo系统,它能够提供高性能和可靠的民用和军事服务,其使用信号频率包括E1(1 575.42 MHz),E5a(1 176.45 MHz),E5b(1 207.14 MHz),E5(1 191.795 MHz)和E6(1 278.75 MHz)[7]。
精密单点定位(precise point positioning,PPP)是从伪距标准单点定位(standard point positioning, SPP)延伸过来,此概念被提出后就引起了广泛的兴趣并且得到了飞速的发展[8]。近些年来许多学者分析了GNSS多频多系统PPP模型性能,文献[9]评估了BDS-2三频静态和动态PPP模型性能,并验证了3种模型性能上基本一致。文献[10]基于原始观测值分析评估了单频和双频PPP性能,结论表明通过多系统组合单频和双频PPP收敛时间能显著提高60%以上。在BDS/Galileo PPP研究方面,文献[11]利用两台Trimble Alloy接收机数据全面分析了BDS PPP和实时差分定位(real time kinematic,RTK)性能。文献[12]评估了BDS-2、BDS-2/BDS-3和多系统GNSS PPP定位性能和天顶对流层延迟(zenith tropospheric delay,ZTD)精度。文献[13]系统性地比较了BDS单频、双频、三频和四频PPP性能。文献[14]利用Galileo E1、E5a、E5b和E5信号观测值分析了四频PPP精密时间频率传递性能。
BDS和Galileo系统都可以观测到四频及更多频率的卫星信号,多频信号在许多方面都具有优势,如低噪声水平、电离层延迟消除、周跳探测,尤其对于PPP研究存在许多潜在优势。对于四频信号观测值,可以根据不同电离层处理策略建立不同四频PPP模型。已有的研究主要侧重于模型本身而缺少模型比较以及全面的性能分析。因此,本文比较和分析了4种BDS/Galileo PPP模型及其性能。首先,全文介绍了传统的双频无电离层PPP模型以及4种四频PPP模型,特别地,本文从理论上比较讨论了3种四频PPP模型的等价性,并分析了BDS/Galileo四频伪距观测值质量。最后通过实际数据分析比较了BDS/Galileo四频PPP静态,仿动态和动态定位性能。
1 四频PPP模型单站绝对定位起始阶段利用的是伪距SPP,但伪距观测值多路径噪声会掩盖原子钟的短期稳定性。通过联合载波相位观测值可以获得更高的稳定性,PPP则是利用伪距和相位观测值联合精密产品获得高精度的位置信息。本节介绍传统的双频无电离层BDS/Galileo PPP模型和4种四频BDS/Galileo PPP模型,同时从理论上分析比较了几种四频PPP模型。
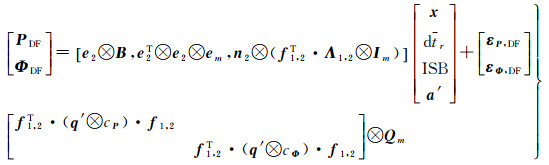
1.1 双频无电离层模型(DF)双频PPP可以使用双频无电离层组合消除一阶电离层的影响,本文统一用DF表示。假设有m颗BDS和Galileo观测卫星,DF模型可以表示为[15]
 (1)
(1)
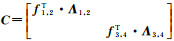
式中,P和Φ表示伪距和相位观测向量; x表示三维位置增量以及对流层天顶湿延迟(zenith wet delay,ZWD); B为其设计矩阵; dtr为估计的接收机钟差; ISB表示BDS和Galileo系统间偏差(inter system bias,ISB),当使用单系统BDS或Galileo卫星时,不需要考虑ISB参数; em表示m行1列向量,其值全为1;a′T=[a1T a2T]表示模糊度向量,其中ai为第i频率上的模糊度; n2=[0 1]T; fm, nT=[α(m, n) β(m, n)]=[fm2-fn2]/(fm2-fn2), (m, n=1, 2, 3, 4)为无电离层频率因子向量,其中f表示对应频率值; Λm, n=diag(λm, λn)为波长的对角矩阵; Im为m维单位阵; εP和εΦ为伪距和相位观测值噪声向量,对应地,cP和cΦ表示伪距和相位方差因子; q′=diag(q12, q22),其中qi表示观测值噪声比例; Qm=diag(sin-2(E1), sin-2(E2), …, sin-2(Em))为余因式矩阵,其中E表示卫星高度角; ⊗为克罗内克积。
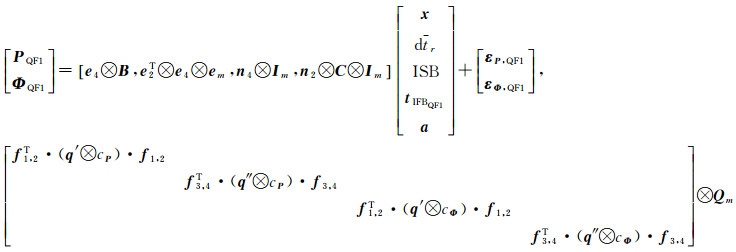
1.2 四频无电离层双组合模型(QF1)四频观测值可以组合出多种双频无电离层观测值,为了保证BDS和Galileo模型的一致性,笔者使用了两组双频无电离层组合(即b1/b2和b3/b4,bi表示第i频率观测值)。相比于BDS卫星,BDS-2卫星缺少四频观测值,这里只使用b1/b2无电离层组合观测值。本文统一用QF1表示该模型,其线性观测方程可以表示为
 (2)
(2)
式中,q″=diag(q32, q42); tIFBQF1表示QF1模型中估计的频内偏差(inter-frequency bias,IFB)向量,IFB参数可以消除不同接收机未校准伪距延迟(uncalibrated code delay,UCD)组合的不一致性; 
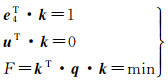
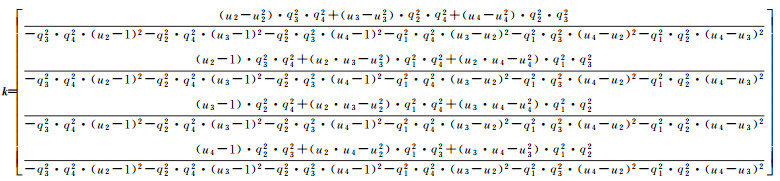
四频观测值可以根据几何距离不变,无电离层和最小噪声构造一组四频组合模型,本文用QF2表示该模型。假设四频观测值噪声为q1:q2:q3:q4,确定四频组合系数kT=[k1 k2 k3 k4]的准则可以表示为
 (3)
(3)
式中,u=[1 u2 u3 u4]T,其中uk=(f1/fk)2, (k=2, 3, 4)表示频率相关乘数因子向量; q=diag(q12, q22, q32, q42)。
因此,QF2模型的组合系数可以表示为
 (4)
(4)
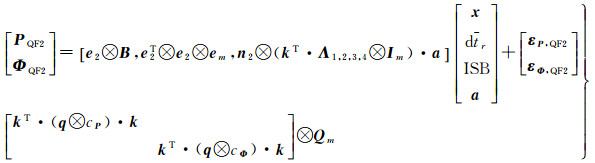
特别地,对于BDS-2,本文使用BDS-2 b1/b2无电离层组合观测值,在此情形下,需要估计IFB参数。不考虑这种情况时,QF2模型可以表示为
 (5)
(5)
式中,Λ1, 2, 3, 4=diag(λ1, λ2, λ3, λ4)。
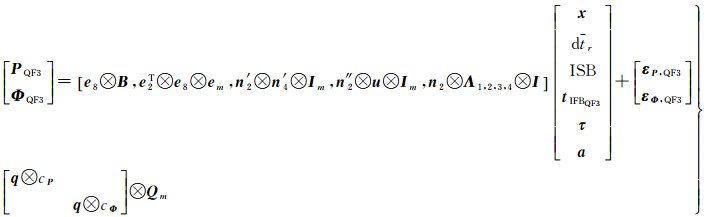
1.4 四频非差非组合模型(QF3)四频非差非组合模型将斜电离层当作未知参数解算,本文用QF3表示。QF3模型的线性观测方程可以表示为
 (6)
(6)
式中,tIFBQF3表示QF3模型估计的IFB向量,分别用来消除第3和第4频点上的伪距观测值偏差影响; τ表示估计的斜电离层向量,其值掺杂了b1/b2接收机差分码偏差值(differential code bias,DCB); n′4=[0 0 1 1]T; n′2=[1 0]T; n″2=[1 -1]T。
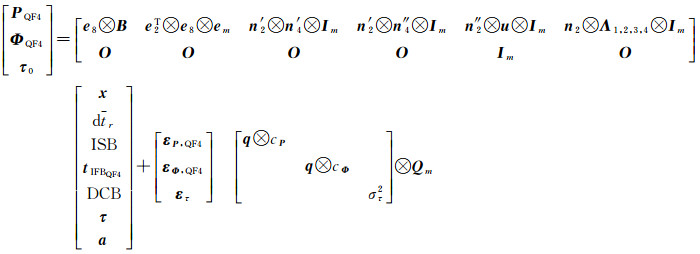
1.5 附加电离层约束四频非差非组合模型(QF4)基于原始观测值的灵活性,利用外部电离层产品如全球电离层格网(global ionosphere map,GIM)或电离层物理机制可以对电离层观测值附加外部约束,本文用QF4表示附加电离层约束四频非差非组合模型,其线性观测方程可以表示为
 (7)
(7)
式中,tIFBQF4表示QF4模型估计的IFB向量; DCB表示接收机b1/b2 DCB值; n″4=[β(1, 2) -α(1, 2) u3·β(1, 2) u4·β(1, 2)]T; τ0表示电离层先验观测值向量; ετ表示电离层先验观测值精度向量; στ表示电离层先验方差。在QF4模型中,为了获取纯净的电离层观测值,需要额外估计接收机DCB值将其有效分离。
1.6 PPP模型理论比较为了证明QF1、QF2和QF3模型的一致性,首先引入等价性原则[16-17]:
分别使用包含n-t和t个参数的向量x1和x2,即
 (8)
(8)
通过最小二乘方法,可以得到
 (9)
(9)
若存在转换矩阵T满足以下条件
 (10)
(10)
则观测值向量也可以表示为
 (11)
(11)
因此, 
 (12)
(12)
由上式可以看出,式(9)和式(12)是否等价取决于是否存在转换矩阵T。
文献[18]证明了差分和非差观测值在理论上是等价的。为了将观测值向量简化以及消除接收机端伪距和相位硬件延迟,本文使用星间单差(between-satellite single-difference,BSSD)观测值表示QF1、QF2和QF3模型。其中,QF3模型的BSSD观测值可以表示为
 (13)
(13)
而对于QF1和QF2模型,满足式(10)条件的转换矩阵分别可以表示为
 (14)
(14)
因此,可以认为QF1、QF2和QF3模型理论上是等价的。也就是说,当3个PPP模型方差协方差矩阵遵循误差传播率,3个模型性能在定位误差收敛后会表现一致。由于对QF4模型附加了电离层外部约束,QF4模型性能会受到影响。
本文假定伪距和相位观测值先验噪声一样并且互不相关。表 1提供了对应的PPP模型特性,包括模型类型、观测值、组合系数,相对于BDS B1I电离层系数和噪声放大系数。其中,QF2模型四频无电离层组合放大噪声系数最小,而在缺失某一频率的情况下,QF3和QF4模型数据处理更加灵活。
| 模型 | 观测值 | e1 | e2 | e3 | e4 | 电离层系数 | 噪声 |
| DF:C | B1I/B3I | 2.944 | -1.944 | 0.000 | 0.000 | 0.000 | 3.528 |
| DF:E | E1/E5a | 2.261 | -1.261 | 0.000 | 0.000 | 0.000 | 2.588 |
| QF1: C | B1I/B3I | 2.944 | -1.944 | 0.000 | 0.000 | 0.000 | 3.528 |
| B1C/B2a | 0.000 | 0.000 | 2.261 | -1.261 | 0.000 | 2.588 | |
| QF1: E | E1/E5a | 2.261 | -1.261 | 0.000 | 0.000 | 0.000 | 2.588 |
| E5b/E5 | 0.000 | 0.000 | 39.585 | -38.585 | 0.000 | 55.279 | |
| QF2: C | B1I/B3I/B1C/B2a | 1.171 | -0.336 | 1.224 | -1.058 | 0.000 | 2.025 |
| B1I/B3I | 2.944 | -1.944 | 0.000 | 0.000 | 0.000 | 3.528 | |
| QF2: E | E1/E5a/E5b/E5 | 2.317 | -0.606 | -0.274 | -0.437 | 0.000 | 2.450 |
| QF3/QF4: C | B1I | 1.000 | 0.000 | 0.000 | 0.000 | 1.000 | 1.000 |
| B3I | 0.000 | 1.000 | 0.000 | 0.000 | 1.514 | 1.000 | |
| B1C | 0.000 | 0.000 | 1.000 | 0.000 | 0.982 | 1.000 | |
| B2a | 0.000 | 0.000 | 0.000 | 1.000 | 1.761 | 1.000 | |
| E1 | 1.000 | 0.000 | 0.000 | 0.000 | 0.982 | 1.000 | |
| QF3/QF4: E | E5a | 0.000 | 1.000 | 0.000 | 0.000 | 1.761 | 1.000 |
| E5b | 0.000 | 0.000 | 1.000 | 0.000 | 1.672 | 1.000 | |
| E5 | 0.000 | 0.000 | 0.000 | 1.000 | 1.716 | 1.000 |
2 数据处理策略
表 2给出了BDS/Galileo PPP详细数据策略。本文着重分析了BDS/Galileo双频和四频PPP定位性能,此外,本文比较了BDS-2双频PPP的定位性能,并分析了BDS单系统和Galileo单系统及BDS/Galileo静态,仿动态以及动态PPP的定位性能。其中,BDS-2 GEO和MEO/IGSO权重比值设置为1:10[19]。为了减弱BDS-2和BDS-3之间存在的时间延迟偏差的影响(receiver time delay bias,TDB),本文将BDS-2和BDS-3 MEO卫星观测值权重设置为1:3,Galileo卫星和BDS-3 MEO卫星观测值权重设置为2:1,伪距和相位观测值权重比为100:1[20]。电离层先验观测值的定权方法参照文献[21]。
| 项目 | 方案 |
| 模型 | BDS(BDS-2+BDS-3)单系统,Galileo单系统和BDS/Galileo双系统DF、QF1、QF2、QF3、QF4模型 |
| 截止高度角 | 7° |
| 卫星轨道 | 武汉大学精密轨道产品[22] |
| 卫星钟差 | 武汉大学精密钟差产品[22] |
| 卫星DCB | 多系统试验网(multi-GNSS experiment, MGEX)提供值 |
| 地球自转 | 模型参考文献[23] |
| 相对论效应 | 模型参考文献[24] |
| 天线相位缠绕 | 模型参考文献[25] |
| 潮汐影响 | 固体潮,极潮和海洋潮模型[23] |
| 卫星和接收机天线 | MGEX参考值 |
| 测站坐标 | 静态PPP:常数估计 动态PPP:白噪声估计(100 m2) |
| 接收机钟差 | 白噪声估计(105 m2/s) |
| 对流层延迟 | 干延迟:GPT3和改进的Hopfield模型; 湿延迟:随机游走估计(10-9 m2/s),VMF3投影函数[26-28] |
| 接收机DCB和IFB | 接收机钟差吸收或常数估计 |
| 电离层延迟 | 无电离层组合消除电离层一阶项或白噪声估计(104 m2/s) |
| 模糊度 | 常数估计 |
3 BDS/Galileo PPP性能分析 3.1 BDS伪距观测值数据质量分析
伪距噪声是由连续独立的钟跳导致的。多路径组合(multipath combination,MPC)可以分析不同频率观测值的多路径和伪距噪声状况,它是通过单频伪距和双频相位观测值构建而成,可以表示为式(15)[29]
 (15)
(15)
式中,pj和lj表示原始伪距和相位观测值; MPC包含载波相位整周模糊度、接收机端伪距和相位延迟以及伪距噪声。
图 1给出了国际GNSS连续监测和评估系统(international GNSS continuous monitoring and assessment system,iGMAS)XIA3站观测到的BDS和MGEX AREG站观测到的Galileo四频观测值MPC标准差(standard deviation,STD)。对于BDS卫星,BDS-2 GEO卫星MPC噪声略小于BDS-2 IGSO和MEO卫星,BDS-3 MEO卫星伪距噪声整体上要小于BDS-2 MEO卫星; BDS-2卫星B1I伪距噪声整体上要大于B3I信号,BDS-3 B1C和B2a新频点伪距噪声要略大于B1I和B3I信号。而对于Galileo卫星来说,不同Galileo卫星的伪距噪声基本上一致,Galileo卫星4个频率上的伪距噪声相差并不明显。

|
| 图 1 BDS和Galileo伪距MPC STD Fig. 1 STDs of the BDS and Galileo pseudoranges MPCs |
3.2 BDS/Galileo静态PPP
为了保证能够观测到足够的BDS和Galileo卫星多频数据,本文选取了2020年年积日(day of year,DOY)1到31号10组MGEX测站进行BDS/Galileo PPP测试。所选的MGEX测站可以观测到BDS-3四频观测值以及可以观测到Galileo四频观测值。表 3提供了所选测站的基本信息,包括测站名、接收机类型和天线类型。对于10组测站,分别分析了BDS(BDS-2+BDS-3)单系统,Galileo单系统和BDS/Galileo双系统DF、QF1、QF2、QF3和QF4模型性能。
| 测站名 | 接收机类型 | 天线类型 |
| BRST、LMMF | Trimble Alloy | TRM57971.00 |
| CEBR、KIRU、KOUR、NNOR、REDU | SEPT POLARX5 | SEPCHOKE_ B3E6 |
| FAA1、MAS1、MGUE | SEPT POLARX5 | LEIAR25.R4 |
以MGEX站BRST(DOY:1,2020)为例,图 2给出了BDS单系统,Galileo单系统和BDS/Galileo双系统PPP模型定位误差。对应地,图 3给出了该测站BDS,Galileo和BDS/Galileo观测卫星数量和位置精度因子(position dilution of precision,PDOP)值。其中,BDS、Galileo和BDS/Galileo平均观测卫星数量为6.7、6.9和13.7,对应平均PDOP值分别为2.7、2.2和1.4。由于使用了更多卫星观测值,相比于单系统PPP,双系统多频PPP性能得到显著提升。对于BDS/Galileo静态PPP而言,定位误差收敛后在北、东和天顶方向的精度可以达到厘米级。QF1、QF2和QF3模型定位性能基本一致。通过引入外部电离层模型GIM约束电离层参数,QF4模型性能一定程度上会受到影响。

|
| 图 2 MGEX站BRST(DOY: 1, 2020)BDS单系统,Galileo单系统和BDS/Galileo静态PPP定位误差 Fig. 2 Positioning error of BDS-only, Galileo-only and BDS/Galileo static PPP models for the MGEX station BRST (DOY:1, 2020) |

|
| 图 3 MGEX站BRST BDS和Galileo观测卫星数以及对应PDOP值 Fig. 3 Number of BDS and Galileo satellites and corresponding PDOP values at station BRST |
图 4和图 5阐明了BDS单系统、Galileo单系统和BDS/Galileo双系统静态DF、QF1、QF2、QF3和QF4模型收敛时间以及三维定位误差均方根误差(root mean square,RMS)箱型图,收敛标准为当前历元和接下来20个历元定位误差小于0.1 m。每个箱型图有5条直线,从底部到顶部分别代表 0%、25%、50%、75%和100%分位数。每个图也提供了统计值的中位数和平均值。由图可知,QF1、QF2和QF3模型性能基本上一致,如BDS PPP 3个模型平均收敛时间分别为61.8、61.6和62.5 min。相比于Galileo单系统PPP,BDS单系统PPP收敛时间较长,随着BDS系统全面建设完成以及BDS系统轨道和钟差产品的逐步完善,BDS PPP性能将逐步提高。对于静态PPP而言,四频PPP模型要优于双频PPP模型。通过附加外部电离层约束,BDS四频PPP性能得到提升,BDS QF4模型相比于QF1、QF2和QF3模型平均收敛时间分别减少了4.4%、4.4%和5.4%。而对于Galileo PPP模型,附加电离层约束会导致收敛时间变长,如Galileo Q4模型相比于Q3模型平均收敛时间增加了16.8 min,这是由于初始阶段GIM模型精度较低造成的。对于BDS/Galileo双系统PPP模型,其收敛时间和定位精度要明显优于BDS和Galileo单系统PPP。

|
| 图 4 BDS单系统、Galileo单系统和BDS/Galileo双系统静态DF、QF1、QF2、QF3和QF4模型收敛时间 Fig. 4 Convergence time of BDS-only、Galileo-only and BDS/Galileo static PPP with DF、QF1、QF2、QF3 and QF4 schemes |

|
| 图 5 BDS单系统、Galileo单系统和BDS/Galileo双系统静态DF、QF1、QF2、QF3和QF4模型三维定位精度 Fig. 5 Three-dimensional positioning accuracy of BDS-only、Galileo-only and BDS/Galileo static PPP with DF、QF1、QF2、QF3 and QF4 schemes |
3.3 BDS/Galileo动态PPP
本文对选取的MGEX测站进行了多频仿动态PPP测试。图 6给出了2020年DOY 3号LMMF站BDS单系统,Galileo单系统和BDS/Galileo双系统仿动态PPP定位误差。从图中可以看出,PPP模型定位精度在收敛后可以达到厘米级,当卫星数量不足或卫星分布较差时,定位精度会达到分米级。同样,图 7和图 8给出了BDS单系统,Galileo单系统和BDS/Galileo双系统仿动态DF、QF1、QF2、QF3和QF4模型收敛时间以及定位误差RMS箱型图。相比于静态PPP,仿动态PPP的收敛时间要明显变长,四频观测值对仿动态PPP性能的提升要更加明显,如BDS QF1、QF2、QF3和QF4模型相比于QF1模型收敛时间分别减少了23.5%、21.9%、19.7%和5.7%。水平方向上,BDS和Galileo PPP模型精度能达到厘米级,而在高程上,BDS单系统PPP模型精度在厘米级到分米级,Galileo单系统和BDS/Galileo双系统PPP精度在厘米级。

|
| 图 6 MGEX站LMMF(DOY: 3, 2020)BDS单系统,Galileo单系统和BDS/Galileo仿动态PPP定位误差 Fig. 6 Positioning error of BDS-only, Galileo-only and BDS/Galileo simulated kinematic PPP models for the MGEX station LMMG (DOY: 3, 2020) |

|
| 图 7 BDS单系统、Galileo单系统和BDS/Galileo双系统仿动态DF、QF1、QF2、QF3和QF4模型收敛时间 Fig. 7 Convergence time of BDS-only、Galileo-only and BDS/Galileo simulated kinematic PPP with DF、QF1、QF2、QF3 and QF4 schemes |

|
| 图 8 BDS单系统、Galileo单系统和BDS/Galileo双系统仿动态DF、QF1、QF2、QF3和QF4模型三维定位精度 Fig. 8 Three-dimensional positioning accuracy of BDS-only、Galileo-only and BDS/Galileo simulated kinematic PPP with DF、QF1、QF2、QF3 and QF4 schemes |
为了验证BDS/Galileo实测动态PPP的定位性能,笔者于2019年12月26日在南京信息工程大学校园进行了动态试验。整个试验过程持续了2 h以上,数据采样率为1 Hz。图 9给出了移动站轨迹和参考站位置。两台接收机都配备了Trimble Alloy接收机,天线类型为TRM57971.00。移动站接收机在静置超过30 min后,试验者手持接收机开始在操场移动,以模糊度固定双差RTK的结果当作动态PPP分析的真值,在整个试验过程中,基线的长度一直小于400 m。

|
| 图 9 移动站轨迹和参考站位置 Fig. 9 Trajectory of the rover station and the location of the reference station |
图 10给出了BDS单系统,Galileo单系统以及BDS/Galileo双系统DF、QF1、QF2、QF3和QF4模型相对于RTK参考值的定位误差。为了便于比较,本文也分析了BDS-2 DF模型的性能。表 4给出了对应PPP模型的RMS统计值。由于初始阶段移动站处于静止状态并且定位结果并未收敛,本文使用了最后90 min的结果进行统计。从图 10和表 4可以看出,BDS-2双频PPP定位精度明显差于BDS双频和四频PPP定位结果,尤其在高程方向上表现更明显。对于动态PPP而言,四频PPP定位精度要明显优于双频PPP,在这一点上Galileo PPP比BDS PPP表现的更明显。对于四频QF1、QF2和QF3模型,差异主要表现在初始阶段,这主要是参数化差异和噪声水平导致而成。比如,对于QF3模型而言,它需要更长的收敛时间来有效分离出斜电离层延迟和模糊度参数。通过附加外部电离层参数约束,BDS QF4模型在北和东方向上的精度产生了较大变化,BDS和Galileo单系统QF4动态模型三维精度得到轻微的提升,如相比于QF1模型,BDS和Galileo QF4模型三维精度分别提高11.4%和31.4%。此外,由于使用了更多的观测卫星,双系统动态PPP定位性能要明显优于单系统。

|
| 图 10 BDS单系统、Galileo单系统以及BDS/Galileo双系统动态DF、QF1、QF2、,QF3和QF4模型三维定位误差 Fig. 10 BDS-only、Galileo-only and BDS/Galileo kinematic PPP positioning errors for DF、QF1、QF2、QF3 and QF4 models in the north, east and up components |
| RMS/cm | 北 | 东 | 天顶 | 3D |
| C2 DF | 24.0 | 20.0 | 28.1 | 42.0 |
| C DF | 21.3 | 13.3 | 19.2 | 31.6 |
| C QF1 | 21.5 | 10.0 | 16.9 | 29.1 |
| C QF2 | 21.7 | 9.7 | 17.0 | 29.2 |
| C QF3 | 21.7 | 9.9 | 16.0 | 28.7 |
| C QF4 | 9.0 | 21.6 | 15.5 | 28.0 |
| E DF | 14.7 | 43.4 | 72.6 | 85.9 |
| E QF1 | 12.7 | 26.5 | 52.6 | 60.1 |
| E QF2 | 12.7 | 26.5 | 52.5 | 60.1 |
| E QF3 | 12.8 | 26.7 | 52.5 | 60.1 |
| E QF4 | 12.3 | 23.8 | 52.5 | 58.9 |
| CE DF | 1.7 | 7.1 | 7.0 | 10.1 |
| CE QF1 | 1.3 | 2.7 | 4.0 | 5.0 |
| CE QF2 | 1.3 | 2.5 | 4.4 | 5.2 |
| CE QF3 | 1.3 | 2.4 | 4.2 | 5.0 |
| CE QF4 | 1.6 | 3.6 | 5.1 | 6.5 |
4 结论
本文提出了4种BDS/Galileo四频PPP模型,即QF1、QF2、QF3和QF4模型,并用等价性原则证明了QF1、QF2和QF3模型的等价性。本文通过实例数据分析得到了以下结论:
(1) BDS-2 GEO卫星MPC噪声略小于BDS-2 IGSO和MEO卫星,BDS-3 MEO卫星伪距噪声整体上要小于BDS-2 MEO卫星。不同Galileo卫星的伪距噪声基本上一致,Galileo卫星4个频率上的伪距噪声相差并不明显。
(2) 对于BDS/Galileo静态和仿动态PPP,QF1、QF2和QF3模型性能基本上一致。通过附加外部电离层约束,四频PPP模型性能受到不同程度上的影响,BDS静态QF4模型相比于QF1、QF2和QF3模型平均收敛时间分别减少了4.4%、4.4%和5.4%,Galileo静态Q4模型相比于Q3模型平均收敛时间增加了16.8 min。
(3) 对于BDS/Galileo动态PPP,四频PPP定位精度要明显优于双频PPP。QF1、QF2和QF3模型的差异主要表现在初始阶段。通过附加外部电离层参数约束,四频PPP模型性能得到轻微提升,相比于QF1模型,BDS和Galileo QF4模型三维精度分别提高11.4%和31.4%。BDS/Galileo双系统动态PPP性能要优于单系统PPP。
| [1] |
JIN Shuanggen, SU Ke. Co-seismic displacement and waveforms of the 2018 Alaska earthquake from high-rate GPS PPP velocity estimation[J]. Journal of Geodesy, 2019, 93(9): 1559-1569. DOI:10.1007/s00190-019-01269-3 |
| [2] |
ZAVOROTNY V U, GLEASON S, CARDELLACH E, et al. Tutorial on remote sensing using GNSS bistatic radar of opportunity[J]. IEEE Geoscience and Remote Sensing Magazine, 2014, 2(4): 8-45. DOI:10.1109/MGRS.2014.2374220 |
| [3] |
PÍRIZ R, GARCÍA Á M, TOBÍAS G, et al. GNSS interoperability:offset between reference time scales and timing biases[J]. Metrologia, 2008, 45(6): S87. DOI:10.1088/0026-1394/45/6/S14 |
| [4] |
LI X X, LI X, YUAN Y, et al. Multi-GNSS phase delay estimation and PPP ambiguity resolution:GPS, BDS, GLONASS, Galileo[J]. Journal of Geodesy, 2018, 92(6): 579-608. DOI:10.1007/s00190-017-1081-3 |
| [5] |
YANG Y, MAO Y, SUN B. Basic performance and future developments of BeiDou global navigation satellite system[J]. Satellite Navigation, 2020, 1(1): 1-8. |
| [6] |
陈秋丽, 杨慧, 陈忠贵, 等. 北斗卫星太阳光压解析模型建立及应用[J]. 测绘学报, 2019, 48(2): 169-175. CHEN Qiuli, YANG Hui, CHEN Zhonggui, et al. Solar radiation pressure modeling and application of BDS satellite[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(2): 169-175. DOI:10.11947/j.AGCS.2019.20180097 |
| [7] |
DIESSONGO T H, SCHVLER T, JUNKER S. Precise position determination using a Galileo E5 single-frequency receiver[J]. GPS Solutions, 2014, 18(1): 73-83. DOI:10.1007/s10291-013-0311-2 |
| [8] |
ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research:Solid Earth, 1997, 102(B3): 5005-5017. DOI:10.1029/96JB03860 |
| [9] |
GUO Fei, ZHANG Xiaohong, WANG Jinling, et al. Modeling and assessment of triple-frequency BDS precise point positioning[J]. Journal of Geodesy, 2016, 90(11): 1223-1235. DOI:10.1007/s00190-016-0920-y |
| [10] |
LOU Yidong, ZHENG Fu, GU Shengfeng, et al. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models[J]. GPS Solutions, 2016, 20(4): 849-862. DOI:10.1007/s10291-015-0495-8 |
| [11] |
ZHANG Zhiteng, LI Bofeng, NIE Liangwei, et al. Initial assessment of BeiDou-3 global navigation satellite system:signal quality, RTK and PPP[J]. GPS Solutions, 2019, 23(4): 111. DOI:10.1007/s10291-019-0905-4 |
| [12] |
JIAO Guoqiang, SONG Shuli, GE Yulong, et al. Assessment of BeiDou-3 and multi-GNSS precise point positioning performance[J]. Sensors, 2019, 19(11): 2496. DOI:10.3390/s19112496 |
| [13] |
JIN Shuanggen, SU Ke. PPP models and performances from single- to quad-frequency BDS observations[J]. Satellite Navigation, 2020, 1(1): 16. DOI:10.1186/s43020-020-00014-y |
| [14] |
ZHANG Pengfei, TU Rui, GAO Yuping, et al. Performance of Galileo precise time and frequency transfer models using quad-frequency carrier phase observations[J]. GPS Solutions, 2020, 24(2): 40. DOI:10.1007/s10291-020-0955-7 |
| [15] |
LEICK A, RAPOPORT L, TATARNIKOV D. GPS satellite surveying[M]. 4th ed. Hoboken, New Jersey: John Wiley & Sons, 2015.
|
| [16] |
CLOSAS P, FERNÁNDEZ-PRADES C, FERNÁNDEZ-RUBIO J A. Maximum likelihood estimation of position in GNSS[J]. IEEE Signal Processing Letters, 2007, 14(5): 359-362. DOI:10.1109/LSP.2006.888360 |
| [17] |
李博峰, 葛海波, 沈云中. 无电离层组合、Uofc和非组合精密单点定位观测模型比较[J]. 测绘学报, 2015, 44(7): 734-740. LI Bofeng, GE Haibo, SHEN Yunzhong. Comparison of ionosphere-free, Uofc and uncombined PPP observation models[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(7): 734-740. DOI:10.11947/j.AGCS.2015.20140161 |
| [18] |
XU Guochang, XU Yan. GPS:theory, algorithms and applications[M]. 3rd ed. Berlin: Springer, 2016.
|
| [19] |
SU Ke, JIN Shuanggen, GE Yulong. Rapid displacement determination with a stand-alone multi-GNSS receiver:GPS, BeiDou, GLONASS, and Galileo[J]. GPS Solutions, 2019, 23(2): 54. DOI:10.1007/s10291-019-0840-4 |
| [20] |
SU Ke, JIN Shuanggen. Triple-frequency carrier phase precise time and frequency transfer models for BDS-3[J]. GPS Solutions, 2019, 23(3): 86. DOI:10.1007/s10291-019-0879-2 |
| [21] |
SU Ke, JIN Shuanggen, HOQUE M M. Evaluation of ionospheric delay effects on multi-GNSS positioning performance[J]. Remote Sensing, 2019, 11(2): 171. DOI:10.3390/rs11020171 |
| [22] |
WANG Chen, ZHAO Qile, GUO Jing, et al. The contribution of intersatellite links to BDS-3 orbit determination:Model refinement and comparisons[J]. Navigation, 2019, 66(1): 71-82. DOI:10.1002/navi.295 |
| [23] |
LI Z, WANG N, WANG L, et al. Regional ionospheric TEC modeling based on a two-layer spherical harmonic approximation for real-time single-frequency PPP[J]. Journal of Geodesy, 2019, 93(9): 1659-1671. DOI:10.1007/s00190-019-01275-5 |
| [24] |
LIU T, YUAN Y, ZHANG B, et al. Multi-GNSS precise point positioning (MGPPP) using raw observations[J]. Journal of Geodesy, 2017, 91(3): 253-268. |
| [25] |
WU J T, WU S C, HAJJ G A, et al. Effects of antenna orientation on GPS carrier phase[C]//Proceedings of Astrodynamics 1991 the AAS/AIAA Astrodynamics Conference. San Diego, CA: Univelt, Inc., 1992: 1647-1660.
|
| [26] |
SU Ke, JIN Shuanggen. Improvement of multi-GNSS precise point positioning performances with real meteorological data[J]. The Journal of Navigation, 2018, 71(6): 1363-1380. DOI:10.1017/S0373463318000462 |
| [27] |
LANDSKRON D, BÖHM J. VMF3/GPT3:refined discrete and empirical troposphere mapping functions[J]. Journal of Geodesy, 2018, 92(4): 349-360. DOI:10.1007/s00190-017-1066-2 |
| [28] |
FAN Haopeng, SUN Zhongmiao, ZHANG Liping, et al. A two-step estimation method of troposphere delay with consideration of mapping function errors[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(1): 76-84. DOI:10.11947/j.JGGS.2020.0108 |
| [29] |
HAUSCHILD A, MONTENBRUCK O, SLEEWAEGEN J M, et al. Characterization of compass M-1 signals[J]. GPS Solutions, 2012, 16(1): 117-126. DOI:10.1007/s10291-011-0210-3 |